Elevate the user experience and visual appeal of your comparison site with our expert UX/UI design services. We specialize in creating intuitive interfaces

Introduction
Point cloud data, comprised of 3D coordinate points representing objects in the physical world, serves as a foundational dataset in the realm of Building Information Modeling (BIM). Derived from laser scanning technologies, this data forms the backbone for creating digital twins of building geometries. However, the conversion of point cloud data into actionable BIM models poses considerable challenges.
In this project, we delve into the application of PointNet, an innovative architecture designed for semantic segmentation, to address these challenges. Unlike conventional methods that necessitate grids or images, PointNet operates directly on raw point clouds, offering unparalleled versatility. By bypassing the need for data restructuring, PointNet streamlines the processing pipeline, making it an indispensable tool in the realm of 3D modeling and analysis.

Point clouds
Point cloud is a widely used 3D data form, which can be produced by depth sensors, such as LIDARs and RGB-D cameras. It is the simplest representation of 3D objects: only points in 3D space, no connectivity. Point clouds can also contain normals to points.
PointNet
The authors of PointNet introduce a neural network that takes all these properties into account. It manages to solve classification, part and semantic segmentations tasks. Let’s implement it!
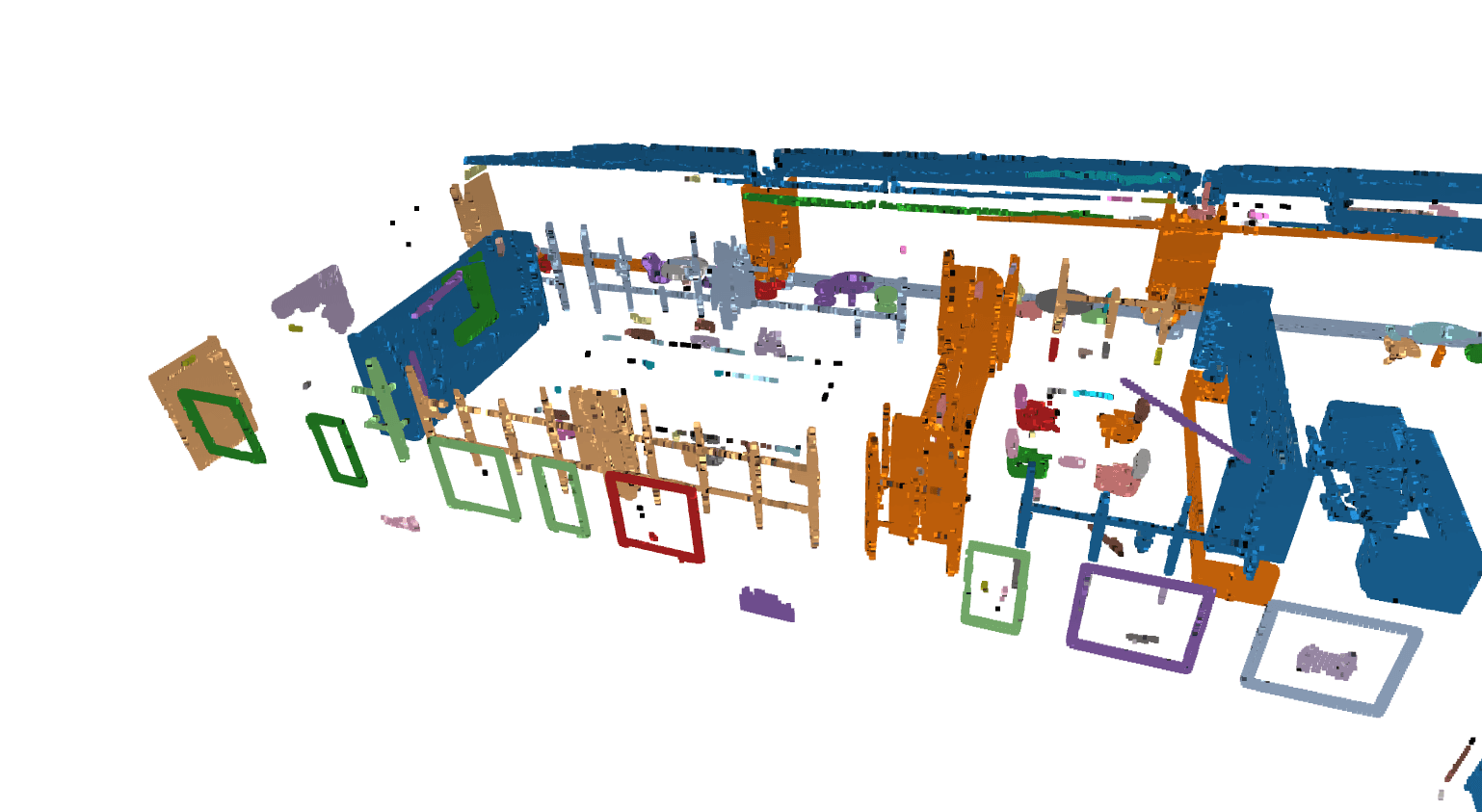
Result


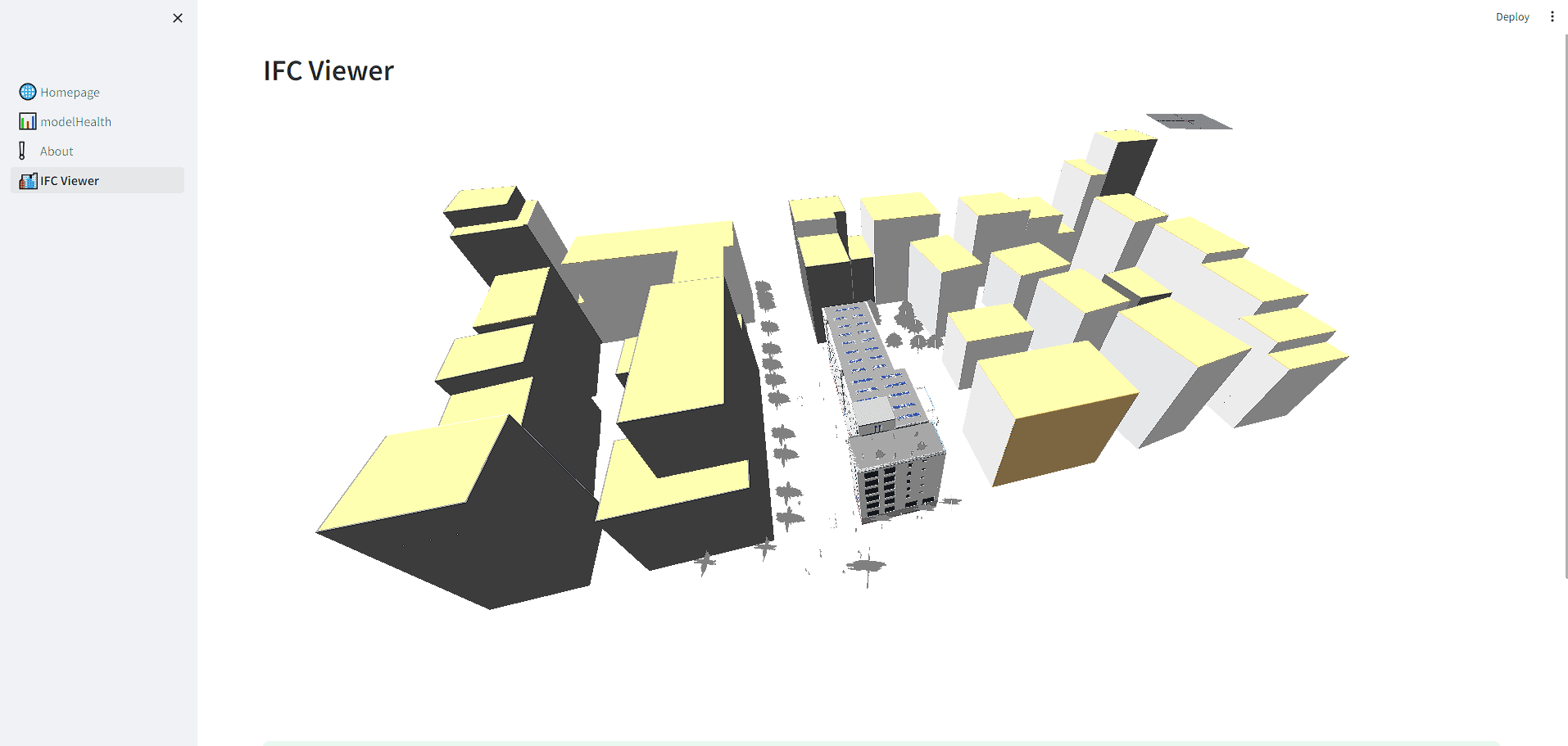
Next step: BIM model generation
The purpose of the point cloud modeling is to produce models, details and documentation for existing buildings and infrastructure.
It is difficult to perform automatic segmentation and classification to create a BIM model from point cloud data. It would be more effective to use predefined classes to identify different objects such as walls, furniture, MEP systems, etc.
Conclusion
In summary, the integration of machine learning techniques in BIM model generation from point cloud data presents promising avenues for automation and acceleration. However, the intricate nature of identifying gaps, unscanned areas, and boundaries in a three-dimensional space underscores the continued importance of human intervention. While machine learning algorithms are poised to enhance their performance and accuracy over time, a pragmatic approach suggests a hybrid model, blending human expertise with automated processes. This synergistic approach not only capitalizes on the efficiency of automation but also ensures the nuanced understanding and adaptability that human oversight provides. As we advance, embracing this hybrid paradigm may offer the most effective path forward in leveraging machine learning for BIM model generation.